SRV-1簡介:
SRV-1是一款多功能履帶式機器人,基於開源軟件平台,通過WIFI進行全程無線通訊,並可實時採集現場視頻,同時還支持自主運行以及集群管理模式。其設計可廣泛應用於各個相關行業的科研、教學以及新產品原型開發等領域當中。
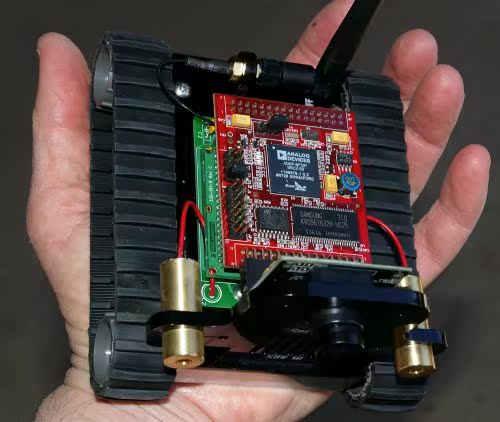
SRV-1無線通訊機器人由SRV-1 Blackfin攝像頭主板(使用Analog Devices公司的500MHz Blackfin BF537 處理器),CMOS攝像頭(分辨率由160x280到1280x1024像素),激光照射點以及WLAN 802.11b/g無線通訊模塊組成,然後整合到一個雙履帶可移動的機體之上。
作為一個可以遠程控制的網絡攝像頭或者一個具有自主導航能力的機器人,SRV-1可以在Blackfin主板的固件之中運行C語言解釋器解釋執行C 程序,或者在Windows,MacOS/X和Linux等系統上,運行基於Python或Java語言編寫的控制台軟件,進行遠程管理。使用Java控 制台的軟件,借助SRV-1內建的網絡服務器,可以實現通過網絡瀏覽器,在世界上任何地方監控並控制SRV-1,並可以根據需求保存視頻。SRV-1 內置的固件還可以支持 RoboRealm 之類的第三方軟件。
產品特點:
‧ 遵循GPL開放全部軟件源碼及硬件設計圖
‧ 機器人具有執行自主運行程序的能力
‧ 第三方軟件的支持,如 RoboRealm
‧ 可以通過軟件控制台或網絡瀏覽器實現對機器人的遠程遙控,具備一定的監控能力
‧ 主機軟件內建網絡服務器並支持視頻存檔
‧ 機器人可以解釋執行儲存在FLASH中或內存中的C程序
‧ 無線遙控範圍:室內 20 米室外 200 米
‧ 機器人可以通過終端控制台進行快捷的控制與調試
‧ 支持二次開發,適合高校的計算機,視覺圖像處理,嵌入式,自動化控制等專業做科研教學或課題產品的原型設計及開發
‧ 支持GNU/Linux操作系統也同時支持直接在DSP上通過GNU bfin-elf-工具鏈開發bare-metal應用
硬件參數:
‧ 處理器:500MHz的ADI Blackfin BF537(1000 mips), 32MB SDRAM, 4MB SPI Flash, JTAG
‧ 攝像頭:Omnivision OV7725, 30 萬像素(最大分辨率 640x480) ,圖像速度每秒最多可達 60 幀,視角範圍為 90 度
‧ 串口無線通訊模塊:Lantronix Matchport 802.11b/g WiFi
‧ 傳感器:2個激光點
‧ 驅動:雙路直流齒輪電機(四個電機,100:1齒輪減速比)驅動雙履帶
‧ 速度:20-40厘米每秒(大約1英尺每秒或0.5公里每小時)
‧ 框架:鋁制機械
‧ 規格:120mm長 x 100mm寬 x 80mm高
‧ 重量:約350克
‧ 電源:7.2V 2Ah鋰電池 使用時間大約4小時
‧ 充電器:100-240交流電50/60Hz
軟件功能:
‧ 基本的圖像處理能力:histogram, pixel sampling, frame difference, blob, scan, count, find
‧ 動態 JPEG 圖像壓縮處理能力
‧ 可支持的攝像頭分辨率:1280x1024 (OV9655 適用), 640x480, 320x256, 160x128
‧ 提供了馬達控制接口 WM (H-bridge) and PPM (servo) WM (H-bridge) and PPM (servo)
‧ 內置的類 c 解釋器,支持用戶編寫腳本讓其自主運行
‧ RTC 時鐘精確到毫秒,內部定時器精確到 10 納秒
‧ 支持擴展外接具有 I2C 或 SPI 通訊能力的設備
‧ 支持 XMODEM 文件傳輸協議
‧ 支持 GNU/Linux 操作系統(包括 u-boot/uClinux)
‧ 已支持的一些外部傳感器: Maxbotics 超聲波測距或者 Sharp 紅外測距傳感器;Locosys 或者 uBlox5 GPS 定位傳感器; Honeywell HMC6352 或者 HMC5843 羅盤,ST LIS3LV02DQ 傾斜傳感器, Analog Devices AD7998 8-channel A/D(多為第三方支持)
軟件特點:
‧ 提供PC,Android,iOS以及NDSL各種平台的控制客戶端
‧ 機器人固件更新方式簡單,可支持通過web頁面直接更新
‧ 豐富的客戶端控制程序,覆蓋桌面及各種移動終端系統(如Android/iOS/ADSL等)
‧ 豐富的控制協議支持,詳細描述見用戶手冊中【機器人控制協議】
‧ 通過內置的微型HTTP服務模塊實現了對機器人操控的平台無關性
‧ 通過內嵌的C解釋器程序實現機器人的自主運行能力
‧ 強勁的郵件列表探討支持
帶外殼及搭載各種傳感器版本:
Android平台豐富客戶端:除了基本的控制操作之外,還內置有Google地圖服務演示GPS實時定位,動態繪製3D方塊演示姿態反饋等功能。
| 






 發表於 2013-8-24 15:39:37
發表於 2013-8-24 15:39:37



 收藏
收藏 分享
分享