| 好鐵,收藏慢慢學習。 |
| 同意,經驗學習是DIY的重點吧^^ |
是的,最好當然是SERVO直接連接四肢中間不作機械傳動,但由於體積和資金等各種問題,迫使我只能在現有資源上設計機器人,這我也是無可奈何... 但另一方面,由於有這些現實上的約束,才會使我想得更多,雖然設計未必好,但可以培養自己的能力和經驗~ 謝謝各位關注我的設計  |
|
本帖最後由 lakers3411 於 2010-12-22 10:15 編輯 如果是我啦~只是未了要增強出力 我會換更好的伺服機,因為做成這樣 也只是為了出力和速度,平均受力等等 都沒有做到 可能大大也會說到asimo也這樣用阿! 但他只是因為設計上的問題才用,如果空間夠 也許他也不會用. |
|
換個方式想 要增加蹲下的扭力, 也就是要加大作用力矩,利用力臂的方式比較有效 也就是說, 先不考慮空間問題, 各位用的是連桿的變化, 我想的是"移動馬達位置" 移動方式可以用程式控制,或是機構的方式 當蹲下的時候馬達移動到力臂最遠的地方(或是垂直的地方), 站的時候移到力臂比較近或斜向作用力的方式 讓力臂達到最大的利用效率,就是改變作用的距離與角度... 以上個人粗略的淺見, 參考看看~ |
|
個人是覺得 直接換高級一點的伺服器是不是比較快?! 不過L大這種作法有不一樣的思考方式 我覺得比較適合用在大型的機器人 驅動使用編碼器搭DC馬達的 使用SERVO用這樣的架構總覺得怪怪的哩 |
|
其實...皮帶有個致命的缺點, 負載重,當皮帶繃緊後,本身就是個負擔, 伺服機如果不好,會壞的更快, 尤其是出力軸@@ |
|
請問你那機器人是用什麼方式操控pc、微晶片? 你那個機器人是怎樣平衡能告訴我嗎 |
|
我也想要作個這個 最近CASE驗收完畢就用新進的這批鈦合金30KG的來試試看 個人是覺得, R大說的連桿結構會很棒 不過我傾向於使用齒輪, 找現成的, 大塑鋼齒輪套SERVO, 小的用耐綸齒輪放轉動軸(這當消耗品) 這樣就能省掉皮帶, 且密合度會好很多 而且齒輪很便宜又好加工 想幹嘛都可以 |
回復 stanley21 例如下圖這樣簡單的使用連桿傳動,短的連桿比長的連桿轉速快, 力矩的部分從1轉到2時,2的位置力矩會比1的時候力矩大,跟你說的差不多, 這只是大概的想法吧.... 
|
|
本帖最後由 ufpatsai 於 2010-12-17 00:38 編輯 ^^看你把兩足設計的那麼複雜,害我手又癢了起來.... 不行..不行..別再害我了啦@@ 不過我有個問題耶,多加一顆伺服,就多一顆重量, 所以整體就多一倍負擔,就效率而言...... 那個日本的設計,針對的是同軸轉向,所以他用一比一的驅動, 我覺得這個出發點比較實際耶@@剛剛想了一下,發現還有一個問題 用大皮帶輪帶動小皮帶輪, 小皮帶輪角度會加大耶@@ 所以大皮帶輪端的伺服動作角度.....勢必要縮小 那力量及扭力的表現.......也會減少哦@@ |
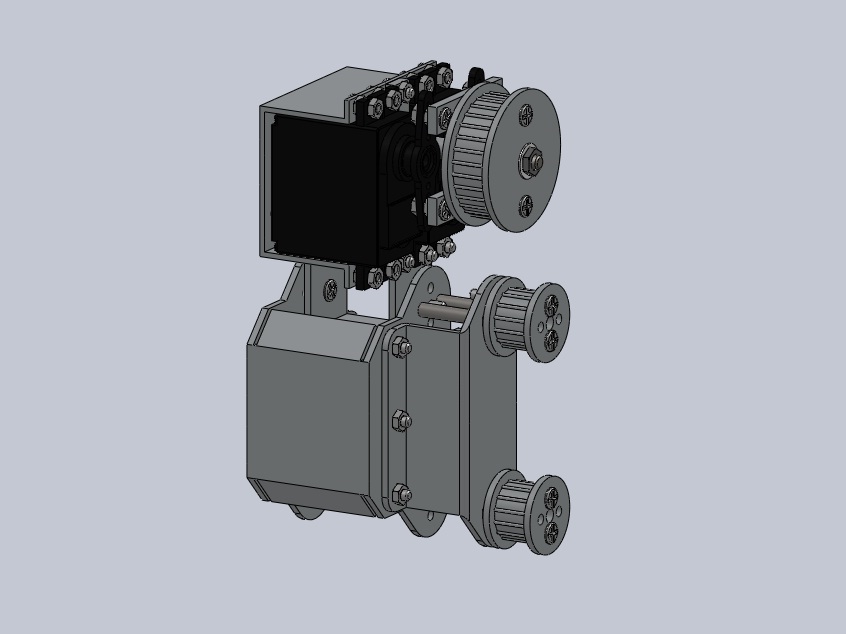
不好意思..因為最近比較忙,沒有跟進好自己的帖子,忽略了照片的問題,現在直接從電腦上傳,應該沒問題了 偷偷告訴你,同減速比的條件下,皮帶驅動的扭力比齒輪高, 而且齒輪要做到零虛位,比皮帶驅動難, 真車引擎內的時規皮帶,要承受高轉速,還有高扭力, 所以.....皮帶是上上之選哦,而且.....很便宜. |
回復 rayrider 有沒有辦法讓連桿傳動的力矩變動,設計成蹲下的時候力矩大,而站直時力矩小? 就是說看看能不能調整連桿二頭各自固定在轉動軸的連桿角度, 不同的設計角度可能會讓蹲下時的力矩較大... 表達的可能不是很清楚@@.... |
| 大大請不要用皮帶改用拉桿傳動比較直接。而且也可以作到你要的放矩放大,皮帶受不了往復頻繁的機構。 |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2024-5-3 09:10 , Processed in 0.396062 second(s), 11 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏