|
|
並非Tower Pro不長進
反而是他們太長進
所以才故意不做高階只做低階
這樣可以用很少的技術人力就達到最大的經濟效益nichal 發表於 2010-3-17 22:47 
nichal大大提出了不同的觀點,
這家輝盛可能有他們不同的策略,
雖然跟我們台灣廠商,要努力創新研發,有差別,
至於鯨魚大所說,
全世界的SERVO大約都是這樣
這種等級的就是採用這樣的材料做的
360度以上的高精度可變電阻很貴, 可能一個至少就要100多元(德國製)
一顆SERVO別的不算, 光可變電阻就要一百多的情形下
我想從只能運轉140度,要變到轉180度,只要把接搖臂的齒輪,縮小約五分之一即可,
如下略圖:
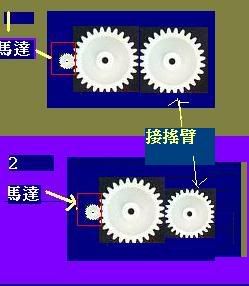
當然扭力會變小一點,
所以,就我判斷,
很可能輝盛這等伺服機,一開始就設計有誤,
如果要改正,就要改變齒輪心的位置,
就要從新做模子,要發錢又麻煩,
乾脆就馬馬虎虎讓它只能運轉140度,
雖然有點不入流,也不在乎,
像gws的伺服機,就能轉到180度,也沒貴多少,
我想目前的伺服機,就像二十年前的 386電腦主機板,
當時一片要賣三千,
現在已經進步到支援雙核心又ALL in ONE, 一片一樣賣三千,
所以產品要不斷改革進步,才是企業永續經營之道,
以後機器人越普遍,由於伺服機使用甚多,
一定是低價位伺服機,才能組合成大眾接受的平價機器人,
所以伺服機,還有很大的改革空間,
不曉得這裡有沒有人,對製造伺服機有興趣,並且有專業知識及門道,
只是缺乏資金,需要別人投資,
說來聽聽,
很可能我願意投資, |
|






 發表於 2010-3-16 15:58:02
發表於 2010-3-16 15:58:02