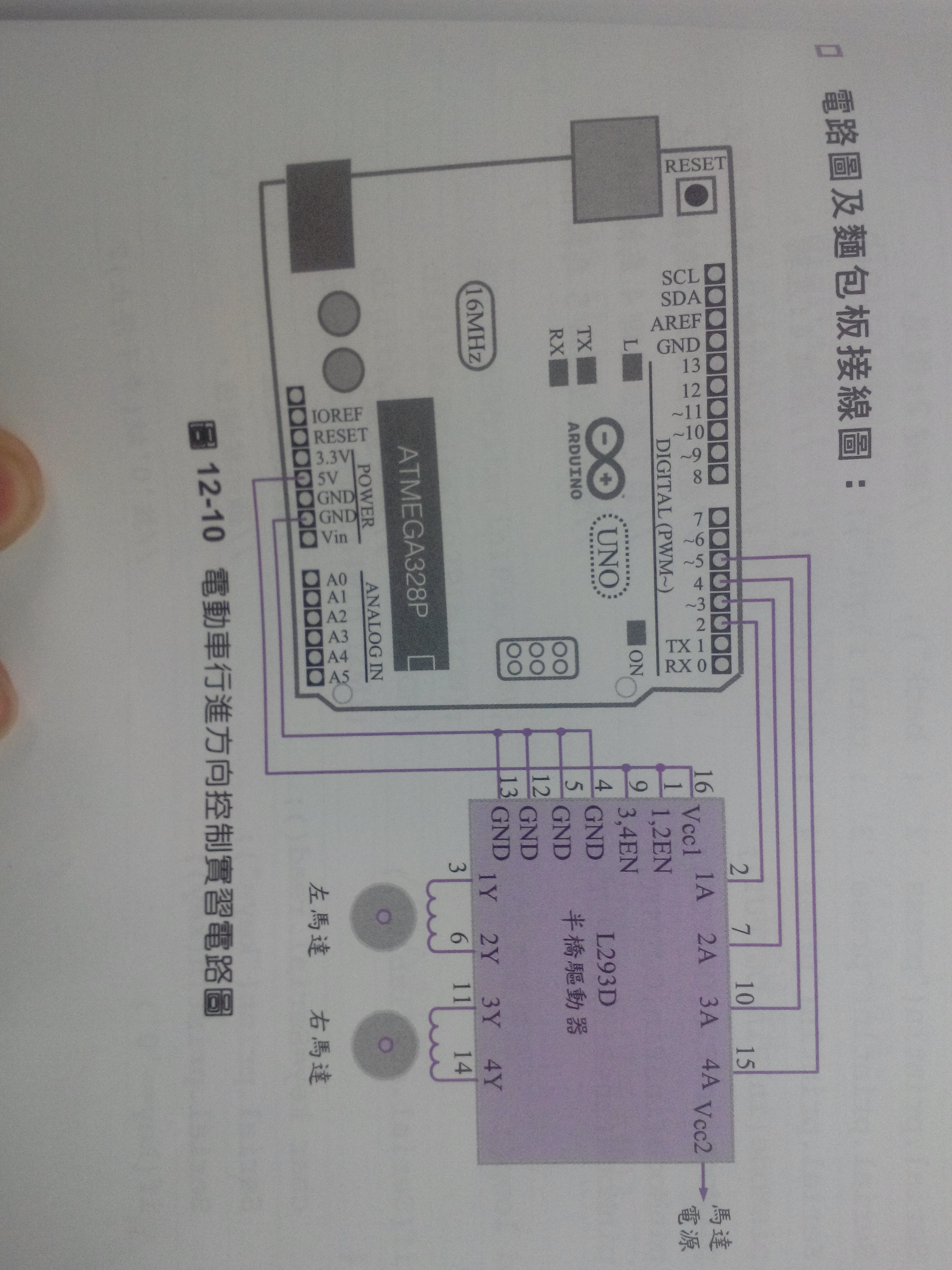
五秒內能控制,超過五秒便一直正轉或反轉 電路圖 #include <IRremote.h> int RECV_PIN = 11; IRrecv irrecv(RECV_PIN); decode_results results; const int in1pin=2; const int in2pin=3; void setup() { &nbs ...
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-19 06:19 , Processed in 0.143837 second(s), 11 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏