原帖由 ffffff2641 於 2007-6-22 00:59 發表
請教ayu大大!!我是用89c52控制的~~
那個網頁上程式應該沒辦法用在89c52吧!!?




原帖由 ffffff2641 於 2007-6-22 00:59 發表
請教ayu大大!!我是用89c52控制的~~
那個網頁上程式應該沒辦法用在89c52吧!!?




原帖由 marbol 於 2007-6-22 19:40 發表
ayu大大~~~~~您也走到這一步囉!!!
VB用ASCII來傳送128~255的數值也是可行的,當初也困擾很久,
不過給試出來了,
只要用矩陣存值間接賦與
Dim buf1 As Integer
Dim num(5) As Byte
), 
 請參考看看吧。
請參考看看吧。原帖由 doubletime 於 2007-7-1 20:58 發表
不知道yyy大大所謂的IDE工具是所謂的?
不過就我的認知您是否是指圖形式處理器設定介面(VISUAL INITIALIZER INTERFACE) ?
還是您要介紹幾種好用的TOOLS給大家使用?

原帖由 zirok 於 2007-7-31 11:44 發表
yyy大大您好喔,我有Keil uVision2這個軟體,那我要模擬的話要怎麼用呢?
我的軟體的介面是英文...,看不懂@q@ 感謝大大喔...話說這裡人變多了
我的檔案.asm 不能用uv3.UV2組譯,一堆這個錯誤訊息=>s ...
原帖由 doubletime 於 2007-7-31 23:49 發表
因為我用的是MPLAB,Microchip,人家的tools就寫得很完善
小弟我覺得寫得很不錯
原帖由 yyy 於 2007-8-1 00:58 發表
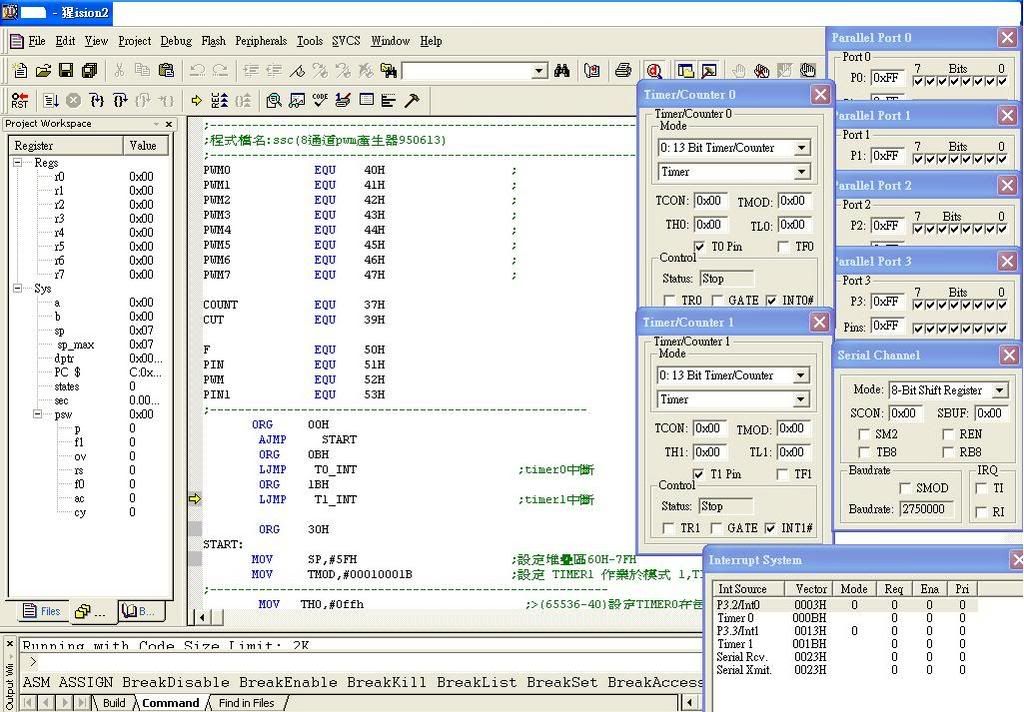
zirok大大您好,程式的編譯如下圖,
http://i210.photobucket.com/albums/bb120/yrobot/8SSC.jpg
對不起,可能要請您到書局找一本全華出版51的書,書名忘記了(c語言的書也可以,只要更換一些操作),很 ...



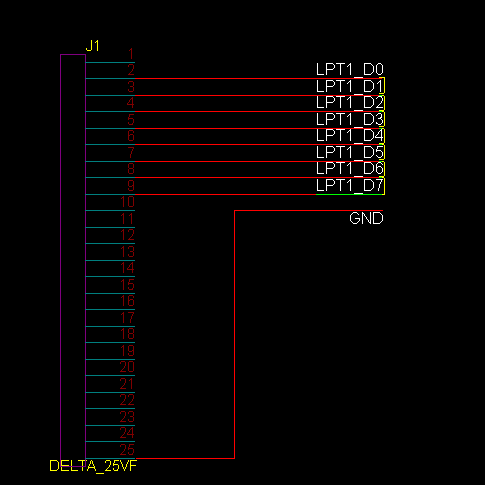
digitrac_scheme_active.png (33.39 KB, 下載次數: 1577)
圖



 我看到了...(以前都在右邊=.=")
我看到了...(以前都在右邊=.=") ,我今天就去買材料來接一接=.="
,我今天就去買材料來接一接=.="  ,下次去買材料應該要先逛一逛該店網站才是...
,下次去買材料應該要先逛一逛該店網站才是...
 ,是開啟digitrace的時候再執行allowio digitrace.exe 這個檔案嗎? 是說指令還是指它的執行檔呢?? 感謝大大~
,是開啟digitrace的時候再執行allowio digitrace.exe 這個檔案嗎? 是說指令還是指它的執行檔呢?? 感謝大大~
未命名.bmp (2.25 MB, 下載次數: 1622)
圖

未命名3.bmp (858.94 KB, 下載次數: 1608)
圖
, 後來我重試了之後,還是不行,我在想是不是我的路徑錯了,我下載的是porttalk22,它底下還有一個叫porttalk的資料夾,不過他裡面只有4個東西,也沒看到allowio.exe, 我是用allowio + 路徑才成功的...,舊版的也可以,感動中...=.="123.bmp (2.25 MB, 下載次數: 1628)
未命名4.bmp (1.2 MB, 下載次數: 1581)
...(因為剝的時候有點用力,沒發現另一條線),兩邊各抓一條,
CIMG0327.JPG (1.7 MB, 下載次數: 1533)
robot_16.jpg (33.98 KB, 下載次數: 1491)
聲音線
,我現在才完全明白...,我的理解力太差了...,請原諒我 ,
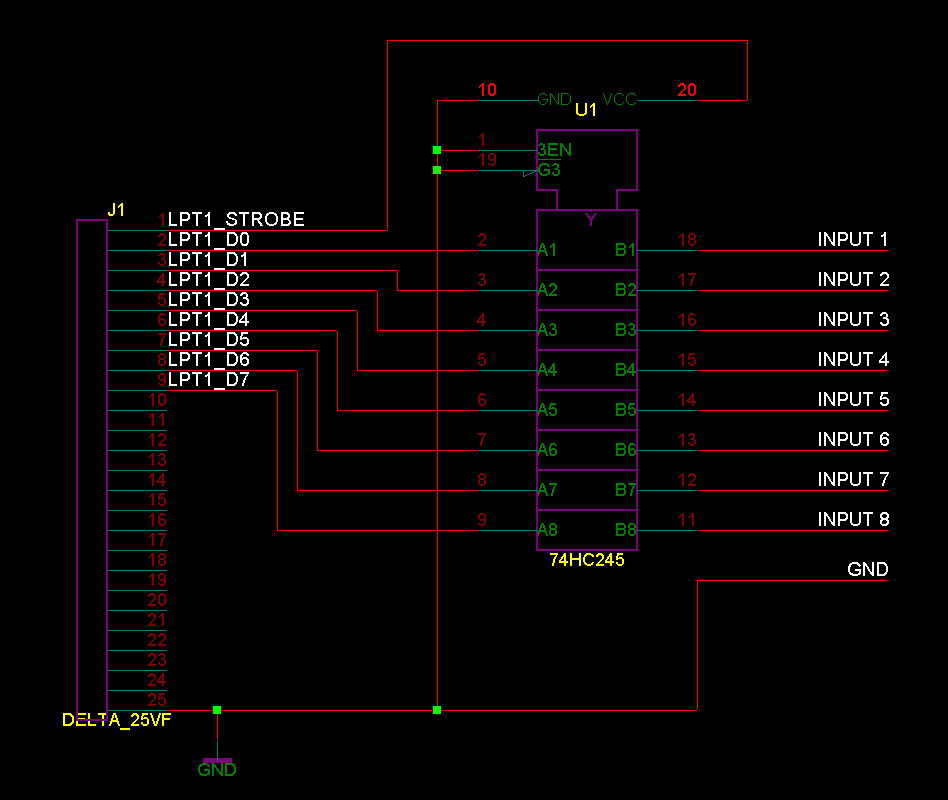
 ,我弄電路時我原本以為就算要用兩個電源分別供給不同的裝置GND還是要接在一起(參考電位要相同麻),可是我今天在測試74hc245的時候發現gnd沒接在一起反而是我要的結果=.=....怎麼會這樣咧...,
,我弄電路時我原本以為就算要用兩個電源分別供給不同的裝置GND還是要接在一起(參考電位要相同麻),可是我今天在測試74hc245的時候發現gnd沒接在一起反而是我要的結果=.=....怎麼會這樣咧...,
我之前的ssc電路伺服馬達供電的gnd和供給89s51的gnd也接在一起...,
我今天在測試74hc245的時候發現gnd沒接在一起反而是我要的結果=.=....
原帖由 irobot 於 2007-8-17 20:36 發表
我只能說這是正確的做法。
至於你說
我也不知為何,可否提供線路圖呢?
這樣說你是否成功量度到方波訊號呢?
,也許是我的鱷魚夾太鬆了...(買回來它的齒就咬不合=.=...),再來去試試看別的東西 ,不過我卻不知道錯在哪 ...我是把中斷的部分都忽略掉了...,還是這樣才是正確的輸出呢? ,晚一點再試耳機...乎
5.91 KB, 下載次數: 2142
程式
 )
) MOV COUNT,A
LOOP2:
MOV R4, #0AH ;10次
LOOP3:
NOP ;每個 nop 延時 1us (t1)
NOP ;每個 nop 延時 1us (t2)
DJNZ R4,LOOP3 ;R4=0時跳下一行 (t3) <=== 連這一句計 (t1+t2+t3) 總數是 4us 。
DJNZ COUNT,LOOP2 ;將PWM LOW的值乘以40us
MOV CUT,#0 ;因為T0中斷給兩個副程式使用,所以CUT累加在此須清除
RET
,想不出啥新玩意兒,只是對機器人蠻感興趣的,剛好這邊又有圖.程式(電路還算簡單@Q@),就來作囉~想說起碼要先能這樣,不然要像板上的大大們能DIY出機器人應該更難 ,B部分的程式還要改這邊:
digitrace_1.jpg (90.13 KB, 下載次數: 1437)
圖1
digitrace_2.jpg (52.94 KB, 下載次數: 1467)
圖2
digitrace_3.jpg (60.75 KB, 下載次數: 1474)
圖3
digitrace_4.jpg (77.42 KB, 下載次數: 1465)
圖4
,我怎麼樣都看不到波形...,而且第一次開啟的時候還是有我之前跟您提到的錯誤訊息... )Cimg2004.jpg (629.21 KB, 下載次數: 1572)
) ,也以為可以看波形囉(所以就在那邊自HIGH...別見怪XD)有圖為證~1.bmp (2.25 MB, 下載次數: 1558)
用了程式後~已開啟digitrace
有圖為證~.bmp (2.25 MB, 下載次數: 1522)
尚未用頻率程式~digitrace開啟中
CIMG0328.JPG (1.67 MB, 下載次數: 1497)
紅線是+vcc
CIMG0329.JPG (1.63 MB, 下載次數: 1484)
灰線是gnd
CIMG0330.JPG (1.7 MB, 下載次數: 1463)
有三張圖...看不清楚我再拍~@q@
,先來去睡一下...,不用密切關注拉~ LOOP:
SETB P1.0
CALL DELAY
CLR P1.0
CALL DELAY ;我這邊不+這一行的話好像都會失敗...不知道為什麼(就是亮度不會變比較暗..)
JMP LOOP
CIMG0352.JPG (30.1 KB, 下載次數: 1450)
我的下上+.-有接在一起~
CIMG0353.JPG (30.19 KB, 下載次數: 1469)
產品編號hd74hc245p
CIMG0354.JPG (29.33 KB, 下載次數: 1475)
合照~ 等等拿去接電腦~
 ,三個月的暑假...,沒DIY出什麼東西來,每一次每一次都對自己蠻失望的, , 總算能用了...真是感謝irobot大大不厭其煩的教導 ,慶幸的是現在只剩程式問題囉~
,三個月的暑假...,沒DIY出什麼東西來,每一次每一次都對自己蠻失望的, , 總算能用了...真是感謝irobot大大不厭其煩的教導 ,慶幸的是現在只剩程式問題囉~ 你總算在假期完結前做好這個了。它很有用的,有了它你便知程式中的問題出在那裡。
你總算在假期完結前做好這個了。它很有用的,有了它你便知程式中的問題出在那裡。  ,對阿...有這個就方便多了,不需要去借很大隻的示波器,我個人覺得蠻方便的@Q@
,對阿...有這個就方便多了,不需要去借很大隻的示波器,我個人覺得蠻方便的@Q@DEL_L: ;延時R7*0.1毫秒,晶振在11.0592MHZ
;MOV R7,#1 ;因為執行DEL_H時已經變成0(暫時想不到當初為什麼要+這個)
MOV A,#27H ;27H X 40us 約 = 1.56ms ,先前已經有1ms了
CPL PWM
ADD A,PWM
MOV COUNT,A
LOOP2:
;SETB TR0 ;開啟T0計數器
;CLR TR0 ;關閉T0計數器
MOV R4,#0AH ;10次
LOOP3:
NOP ;每個 nop 延時 1us
NOP
DJNZ R4,LOOP3 ;R4=0時跳下一行=>(1us+1us+2us)X10 = 40us
DJNZ COUNT,LOOP2 ;將PWM LOW的值乘以40us
MOV CUT,#0 ;因為T0中斷給兩個副程式使用,所以CUT累加在此須清除
RET
,算數邏輯指令好像都要先放到A暫存器裡, ,真是怪怪~
prevbutton2.png (3.63 KB, 下載次數: 1433)
1.JPG (28.67 KB, 下載次數: 1368)
2.jpg (29.61 KB, 下載次數: 1415)
3.JPG (28.56 KB, 下載次數: 1429)
做得不錯。4.JPG (37.85 KB, 下載次數: 1433)
,我是"學會"怎麼用而已~,軟體是irobot大大推薦的~ pull-up.jpg (11.78 KB, 下載次數: 1638)
,嗯...我也是這樣接的,也有量一下電壓...,我是用提供MCU的電源拉一條線去接電阻(1K歐姆),不過好像沒變動很大=~=",嗯..再試試看好了原帖由 zirok 於 2007-8-29 00:09 發表
每次都要您費心,麻煩您了
| 歡迎光臨 Robofun 機器人論壇 (https://www.robofun.net/forum/) | Powered by Discuz! X3.2 |


