
 )
)
 ,
, 

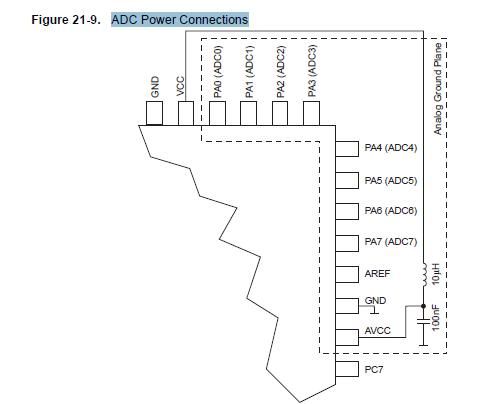
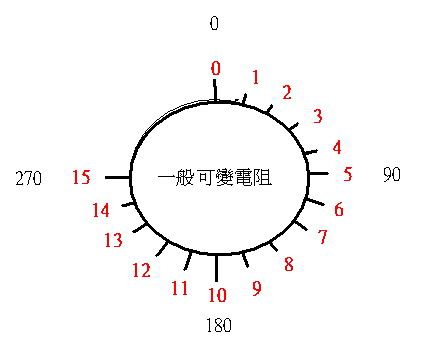
另外提醒一下,因為要作 ADC 輸入
「線長」也是會影響準確度的問題之一
環境的天線效應是讓雜訊進來的主因
掛一堆濾波器也搞不定
只好 10bit->8bit->7bit->6 bit... 到最後只有 很概略的資料能用
mac1 發表於 2010-5-21 17:13

可以讓ADC直接就掛在每個可變電阻下
以數位通訊(RS485或I2C)的方式將資料傳回來...........
nichal 發表於 2010-5-22 17:16

很嚇人....今天打電去利基問了一下32軸控制板要多少錢~
結果一個板子要5000-10000元....
無言了..
...
0980702824 發表於 2010-6-19 22:28
回復 lakers3411
今天又證實了一下~那個業務他說的價格是一整套的價錢範圍...
何謂一整套??
...
0980702824 發表於 2010-6-20 16:56
遙控器方面,如果距離不遠,用紅外線比較便宜又簡單吧
RF 遙控會有天線長短,方向,障礙物,干擾...問題,都會讓信號影響很大...
光華商場外面的地下樓我找到一支遙控器 20元, 用的是 NEC code,
在買接收的IR 就可以用了, sample code 也很容易找到,
可以考慮看看...mac1 發表於 2010-6-21 09:50
回復 mzw2008
你竟然是買鐵蛋~我傷心了~
lakers3411 發表於 2010-6-21 20:46
| 歡迎光臨 Robofun 機器人論壇 (https://www.robofun.net/forum/) | Powered by Discuz! X3.2 |
